

دانشمندان دانشگاه TU Delft و دانشگاه هاروارد با استفاده از اوریگامی، یکی از سادهترین مکانیزمهای رباتیک را طراحی کردهاند که قادر است تنها با استفاده از یک محرک در جهات مختلف حرکت کند. این رویکرد مینیمالیستی میتواند توسعه سیستمهای رباتیک سبک، کمهزینه و سازگار با قطعات الکترونیکی کمتر را پیش ببرد.
به گزارش خبرنگار دیدهبان علم ایران، داوود فرهادی، استادیار دانشگاه فنی دلفت در توضیح این دستاورد که اخیراً در مجله Advanced Materials ارائه شده است، میگوید: «اوریگامی که به طور سنتی به عنوان یک هنر دیده میشد، اکنون بر نحوه مهندسی مواد تأثیر میگذارد. این یک حوزه نوظهور است که روشهای کاملاً جدیدی را در طراحی سیستمهای رباتیک ارائه میدهد.»
یک محرک، دو جهت
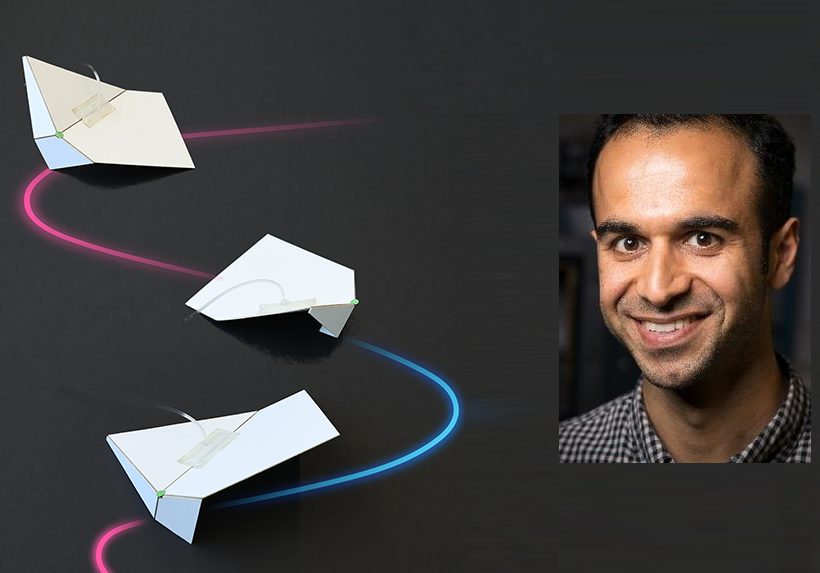
در رباتیک مرسوم، جهتیابی در چندین جهت معمولاً به چندین محرک نیاز دارد که هر کدام نوع متفاوتی از حرکت را کنترل میکنند. فرهادی توضیح میدهد: «یک ماشین را در نظر بگیرید. موتور آن را به جلو میراند، در حالی که یک مکانیزم فرمان جداگانه – که توسط راننده کنترل میشود – مسیر آن را هدایت میکند. سیستم ما با دستیابی به هر دو حرکت رو به جلو و چرخش تنها با یک محرک، این فرض را به چالش میکشد.»
این تیم تلاش کرد تا دریابد که چگونه تغییرات هندسه بر سادهترین الگوی اوریگامی – یک ورق با چهار خط تا – تأثیر میگذارد. آنها الگوریتمهایی را برای شبیهسازی رفتار حرکتی ورقهای مستطیلی تا شده در امتداد این خطوط توسعه دادند. فرهادی با تجزیه و تحلیل میلیونها طرح شبیهسازی شده، کشف کرد که تقریباً ۱۰ درصد قادر به حرکت هستند.
جالب اینجاست که در میان اینها، زیرمجموعهی کوچکتری میتوانست در بیش از یک جهت حرکت کند. آنها دریافتند که انتخاب دقیق الگوهای تاخوردگی خاص، حرکت پیچیدهای ایجاد میکند و به یک محرک واحد اجازه میدهد تا ورق را در چندین جهت هدایت کند.
آینده اوریگامی
اوریگامی چندین مزیت عملی ارائه میدهد: ضایعات مواد را به حداقل میرساند، نیاز به تولید کاهشی را از بین میبرد و امکان استفاده از ورقهای نازک و با کارایی بالا را فراهم میکند.
فرهادی خاطرنشان میکند: «ارزان و مقیاسپذیر است.» سیستمهای رباتیک الهام گرفته از اوریگامی میتوانند به طور قابل توجهی کارآمدتر باشند.
به عقیده فرهادی با این رویکرد «به جای ارسال یک مریخنورد حجیم به مریخ برای بررسی دمای سطح، میتوانید مجموعهای از ورقهای رباتهای اوریگامی را ارسال کنید که باز میشوند و منطقه بسیار بزرگتری را کاوش میکنند.»
او امیدوار است که سادگی این طرح، دانشآموزان، محققان و مربیان را ترغیب کند تا خودشان رباتیک مبتنی بر اوریگامی را آزمایش کنند.
فرهادی میافزاید: «ما آن را به صورت کلاسیک نگه داشتیم، اما با تغییر هندسه – مانند استفاده از لبههای گرد یا اضافه کردن تاهای منحنی – میتوانیم انواع بیشتری از حرکت، مانند غلتیدن، شنا کردن یا پریدن را امکانپذیر کنیم.»
تحقیقات گستردهتر فرهادی و تیمش بررسی میکند که چگونه غیرخطیهای هندسی میتوانند نحوه طراحی سیستمهای رباتیک را تغییر دهند، برای مثال با کاهش نیاز به قطعات الکترونیکی.
انتهای پیام
* نشانی ایمیل شما منتشر نخواهد شد. بخشهای موردنیاز علامتگذاری شدهاند