ساخت «قایق ربات خودران» حفاظت اسکله ها در دانشگاه تهران
 کد خبر:15669
کد خبر:15669
شنبه، ۳۰ بهمن، ۱۳۹۵ | 17:19

محققان مهندسی مکانیک (بیوسیستم) دانشگاه تهران در قالب تحقیقات سه رساله دکتری و پنج پایان نامه کارشناسی ارشد و دو پروژه کارشناسی موفق به طراحی و ساخت قایق ربات خودران شدند.
به گزارش خبرنگار دیدهبان علم ایران، پروژه طراحی و ساخت «قایق ربات خودران» به منظور کنترل، حفاظت و پایش عمق پای اسکلهها و حوضچههای بنادر به سفارش سازمان بنادر و دریانوردی طی دو سال (۱۳۹۳-۱۳۹۵) در دانشگاه تهران اجرا شده که گرامیداشت یاد و خاطره شهدا و رزمندگان و عملیات بزرگ مروارید، قایق خودران ساخته شده به نام «مروارید» نامگذاری شده است.
پروژه مروارید که دو تن از اعضای هیات علمی دانشگاه تهران به عنوان مجری طرح در آن مشارکت داشته اند در کارگاه مکاترونیک دانشکده مهندسی و فناوری کشاورزی دانشگاه تهران اجرا شده و قایق ربات خودران قرار است به صورت پایلوت در یکی از بنادر کشور استفاده شود.
به گفته مجریان طرح، اگرچه وظیفه اصلی قایق کاملا هوشمند مروارید، ترسیم نقشه هیدروگرافی کف بنادر در دفتر کار است از آن برای سایر وظایف پایش دریا و بندر نیز می توان استفاده کرد.
قایق مروارید در چهار مد کاری کنترل از روی خود قایق (سرنشین دار)،کنترل با فرستنده از کنار دیوار اسکله، کنترل از دفتر کار توسط برنامه کاربری نوشته شده و کنترل کاملا اتوماتیک بدون نظارت شخص عمل میکند.
تست نهایی مروارید
تست نهایی پروژه مروارید چندی قبل طبق برنامه ریزی ابتدایی در بندر امیر آباد با موفقیت انجام شد که شامل راه اندازی قایق در شرایط نهایی بندر، رفع عیوب احتمالی، انجام آزمایشهای مختلف و ارزیابی نهایی پروژه بود.
پس از تست اول و دوم، که در دریاچه چیتگر انجام شده بودند، نواقص مشاهده شده در عملکرد سخت افزاری و نرم افزاری به منظور رفع و ارتقا ثبت شد. تمامی مشکلات ثبت شده، قبل از انجام تست نهایی در کارگاه رفع شد ولی حتی با ضرایب اطمینان بالا نیز بروز برخی مشکلات در شرایط واقعی اجتناب ناپذیر است که می بایست در مرحله نهایی و در طول تست رفع میشد.
طی این مدت، ارزیابیهای مربوط به عملکرد مدارها در شرایط رطوبتی و دمایی واقعی و همچنین عملکرد صحیح موتورهای پیشران و سامانه کنترل تحت بار حرکتی به صورت مکرر بررسی و نتایج ثبت شد. از مهمترین بخشهای مورد ارزیابی در این تست، نرم افزارهای توسعه داده شده برای کنترل قایق و همچنین نرم افزار توسعه داده شده برای مرکز کنترل بود.
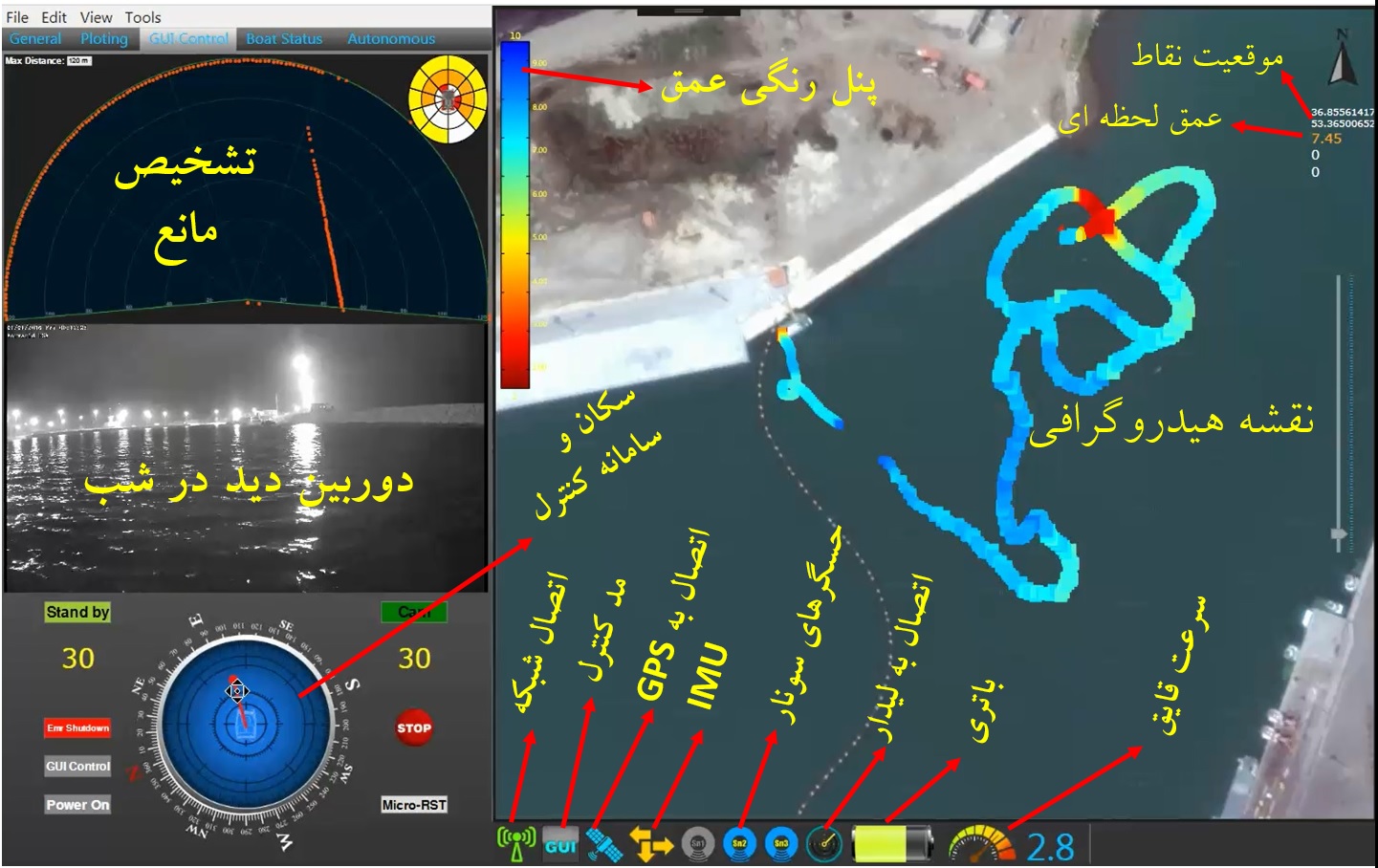
نرم افزار کنترلی مروارید که از یک PC با استاندارد دریایی استفاده می کند، شامل بخشهای مختلف برای راه اندازی قسمتهای شامل لیدار، IMU و حسگرهای فراصوت، حسگرهای عمق سنج، سامانههای ایمنی و کنترلی و ارتباط با مرکز است. این نرم افزار به عنوان سرور اصلی روی قایق شروع به کار کرده و همزمان با تلاش برای اتصال به GPS و راه اندازی بخش های مختلف، امکان ارتباط با مرکز کنترل را فراهم میکنند.
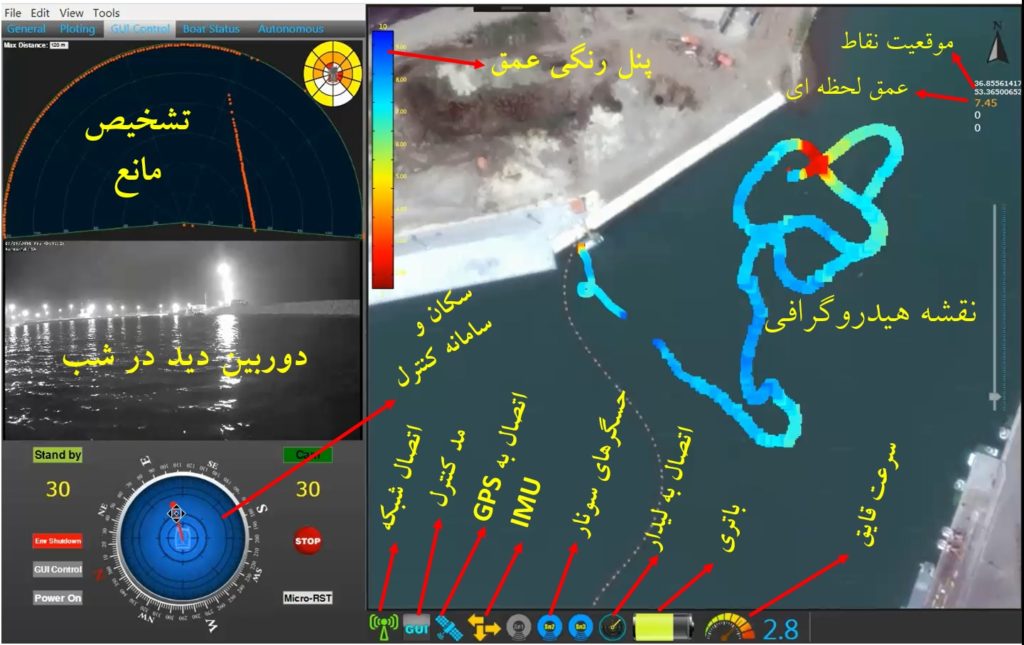
نمایی از نرم افزار توسعه داده شده برای مرکز کنترل مروارید
نرم افزار توسعه داده شده برای مرکز کنترل که به منظور ترسیم نقشه هیدروگرافی به صورت آنلاین، تبادل اطلاعات کنترلی و داده با قایق، کنترل از طریق GUI و نمایش وضعیت قایق استفاده میشود در حقیقت پل میان کاربر و قایق است که با استفاده از پوشش آنتنهای موجود در بندر میتوان قایق را در هر لحظه پایش کرده و در صورت لزوم دستورات لازم را برای قایق ارسال کرد.
از مهمترین پیشرفتهای تست نهایی نسبت به تستهای پیشین راه اندازی کامل و رفع عیوب مربوط به حرکت خودکار قایق است. در این تست، تمام حالتهای کنترلی مورد تست و ارزیابی قرار گرفت. ارزیابی نتایج نشان داد که کنترل خودکار، دقیق ترین روش کنترلی است.
از دیدگاه تامین انرژی، قایق ربات مروارید کاملا خودکفا میباشد و در طول یک ماه تست در روزهای کوتاه زمستانی که زاویه خورشید نسبت به زمین در مایلترین وضعیت خود در بندر امیرآباد را دارد، این ادعا اثبات شد.
سامانه ردیاب خورشیدی از لحاظ پایداری و مقاومت در برابر امواج شدید نیز تست شد که نتایج رضایت بخش بود. با این حال، منبع تغذیه مناسب برای اطمینان بیشتر و مواقع ضروری در نظر گرفته شده است که میتوان از برق شهری برای شارژ باتری استفاده کرد.
انتهای پیام
توکنسازی، قلب تپنده مدلهای هوشمند تحلیل سریهای زمانی
راهاندازی نخستین خط تولید قلمهای تزریق «تیرزاپاتاید» با تلاش محققان دانشگاه تهران
دستاورد محقق ایرانی در تشخیص غیرتهاجمی سرطان با تحلیل DNA آزاد خون
درخشش دانشگاه تهران در بخش دانشجویی «جایزه جهانی معماری منظر»

* نشانی ایمیل شما منتشر نخواهد شد. بخشهای موردنیاز علامتگذاری شدهاند