

در کانادا، حدود ۱۳.۷ درصد از افراد ۱۵ ساله و بالاتر از معلولیت های حرکتی رنج می برند به طوری که برای راه رفتن یا بالا رفتن از پله ها نیاز به استفاده از وسایل کمکی مانند عصا و ویلچر دارند؛ علیرغم استفاده گسترده، این ابزارهای سنتی دارای محدودیتها و چالشهایی در دسترسی روزانه هستند.
به گزارش خبرنگار دیدهبان علم ایران، برای حل این معضل، مجتبی احمدی، محقق دانشگاه کارلتون در حال طراحی اسکلتهای بیرونی پیشرفته – دستگاههای روباتیک پوشیدنی با نیروی هوش مصنوعی (AI) است. هدف این اسکلتهای بیرونی فراهم کردن نیروی کمکی برای پیادهروی و فعالیتهای روزانه و در عین حال رفع محدودیتهای دستگاههای کمکی سنتی – ارائه بهبود تحرک و دسترسی برای افراد دارای معلولیت در کانادا و فراتر از آن است.
احمدی، استاد دپارتمان مهندسی مکانیک و هوافضا در کارلتون میگوید: «اسکلتهای بیرونی میتوانند به افراد کمک کنند بایستند و راه بروند، آنها میتوانند در وضعیت بدن کمک کنند. اگر دستگاه به اندازه کافی قوی و هوشمند باشد، راهی عالی برای افراد دارای معلولیت برای بازیابی عملکرد و استقلال است.»


مجتبی احمدی، استاد مهندسی مکانیک دانشگاه کارلتون
پیشرفت اسکلت های بیرونی سنتی با هوش مصنوعی
اسکلت های بیرونی رباتیک در دهه ۱۹۶۰، عمدتاً برای مصارف نظامی و صنعتی پدیدار شدند. تا اواخر دهه ۲۰۰۰ بود که پیشرفت های قابل توجهی انجام شد که منجر به توسعه آنها برای اهداف پزشکی و توانبخشی شد.
بسیاری از اسکلتهای بیرونی علیرغم پیشرفتهایشان، هنوز به خوبی با مقاصد کاربر سازگار نیستند. اگر اسکلت بیرونی نیروی زیادی اعمال کند یا به شکل غیرمنتظره ای حرکت کند، می تواند منجر به آسیب یا تصادف شود.
در آزمایشگاه پیشرفته بیومکاترونیک و حرکت (ABL) کارلتون، احمدی و تیم تحقیقاتیاش در حال برنامهریزی نسل بعدی اسکلتهای بیرونی روباتیک با استفاده از هوش مصنوعی هستند تا بهطور یکپارچه با کاربران همکاری کنند.
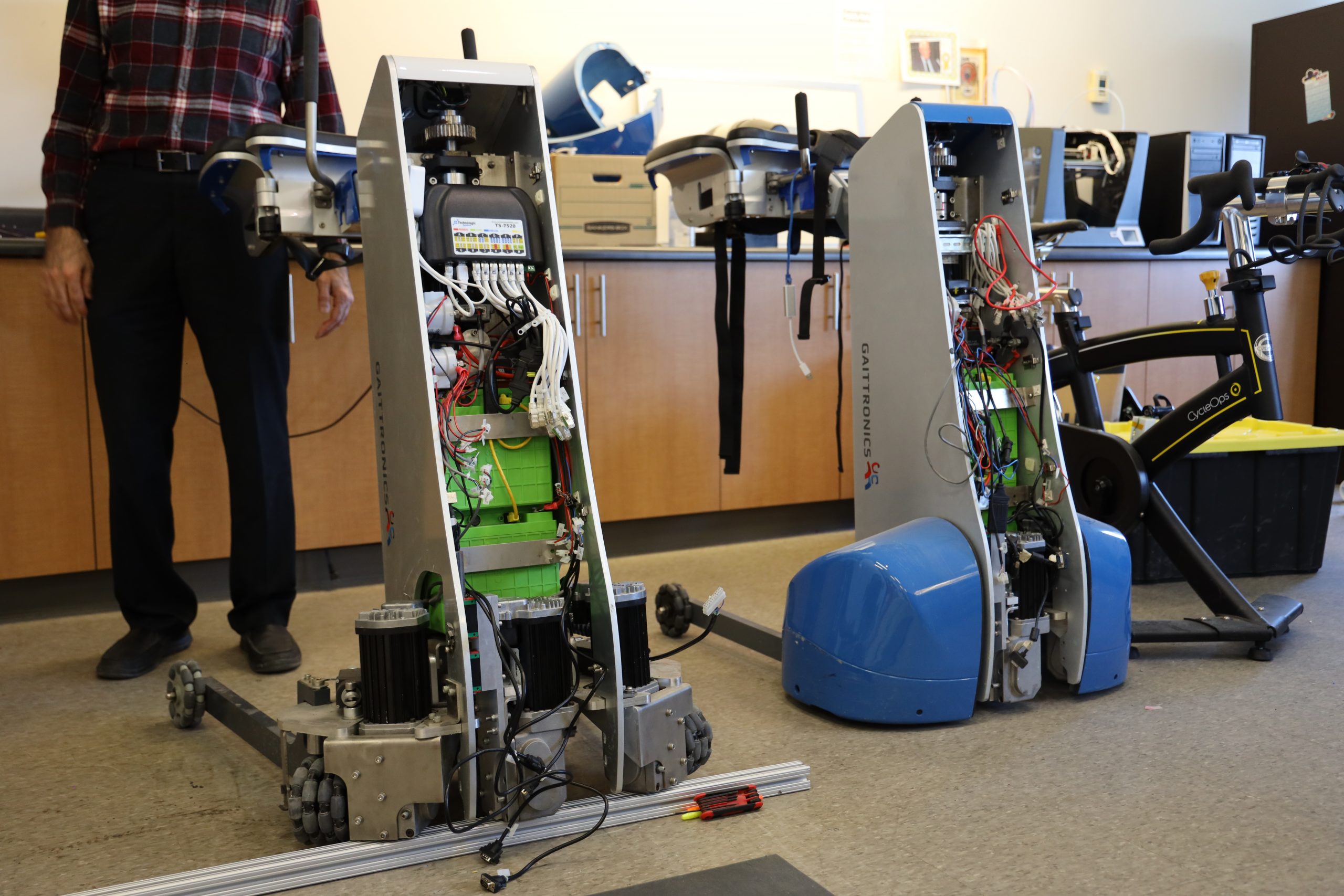

نمونه اولیه یک دستگاه پیاده روی ساخته شده در آزمایشگاه ABL
احمدی توضیح میدهد: «هدف ما توسعه کنترلکنندههایی بر اساس سیگنالهای بدن است که به کمترین برنامهریزی قبلی نیاز دارد.»
برای دستیابی به این سطح از هوش ماشینی، تیم احمدی از فناوری حسگر برای جمعآوری دادههای مربوط به حرکات افراد استفاده میکند. این شامل اتصال حسگرهای الکترود به پوست فرد بر روی ماهیچههای مختلف و انجام کارهای روزمره از آنها است.
سنسورها با برداشتن ولتاژهای کوچک و دسته بندی آنها با یک وظیفه خاص، حرکات کاربر را شناسایی و ثبت می کنند. با استفاده از جمعآوری دادههای این مرحله، تیم احمدی میتواند اسکلت بیرونی را برنامهریزی کند تا بفهمد حرکات یک فرد به چه معناست.
برای کسی که کمی عملکرد یا قدرت دارد، ارائه تمام تلاشی که برای انجام یک کار لازم است ایده خوبی نیست. در غیر این صورت، ماهیچهها و استخوانها کوچکتر و ضعیفتر میشوند.
این تعادل ظریف همان چیزی است که احمدی از آن به عنوان کمک تنظیم شده یاد میکند.
او میگوید: «نشانههای بدنی هر کس متفاوت است. اسکلت های بیرونی باید به گونه ای طراحی شوند که نیازهای منحصر به فرد هر کاربر را برآورده کنند.»
ساخت اسکلت بیرونی برای راه رفتن کمکی
در آزمایشگاه، تحقیقات احمدی نه تنها بر حل چالشهای مهم اسکلتهای بیرونی کنونی متمرکز است، بلکه فرصتهای یادگیری تجربی ارزشمندی را برای دانشجویان ارائه میدهد.
پروژه «دستگاههای کمکی هوشمند حضور از راه دور» احمدی (iTAD) شانزده دانشجوی سال چهارم مهندسی را در توسعه رباتهایی که برای تحرک کمکی طراحی شدهاند گرد هم میآورد. در حال حاضر، تمرکز آنها بر روی طراحی یک دستگاه راه رفتن کمکی اسکلت بیرونی سبک است – که آنها EAWa نامگذاری کردند.
احمدی میگوید: «هدف افزایش دسترسی به افرادی است که با ناتوانی در راه رفتن زندگی میکنند و به کارکنان مراقبتهای بهداشتی کمک میشود تا راحتتر و کارآمدتر از بیماران خود حمایت کنند.
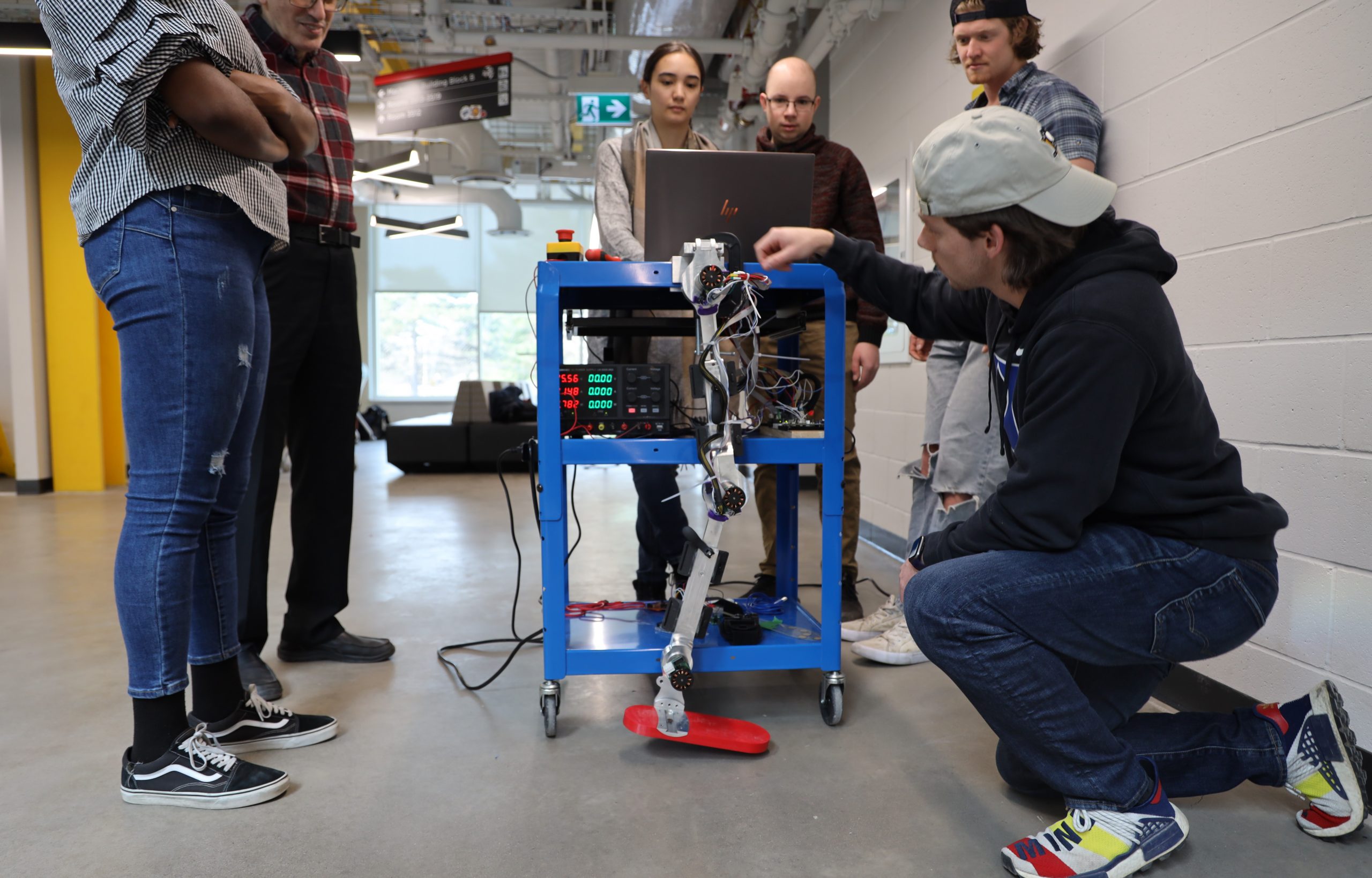

دانشجویان مهندسی مکانیک در حال ساخت یک اسکلت بیرونی برای راه رفتن کمکی به نام EAWa هستند
EAWa – که در اطراف پاها، باسن و پاها استفاده می شود – عمدتاً از آلومینیوم و مواد پرینت سه بعدی ساخته شده است که باعث سبکی وزن و استفاده آسان می شود. این دستگاه که به موتورها و حسگرها مجهز است، در نهایت از فناوریهای یادگیری ماشینی مشابه مورد استفاده در آزمایشگاه ABL کارلتون استفاده خواهد کرد.
“به طور مشابه، اگر کاربر در حفظ تعادل مشکل داشته باشد، او را در حالت ایستاده پشتیبانی می کند.”
این دستگاه بخشی از یک پروژه سه ساله است. در سال اول، دانشجویان بر جنبه های طراحی تمرکز کردند و شروع به ساخت نمونه اولیه کردند. امسال گروه متفاوتی برای ادامه ساخت و اجرای کنترلرهای پایه و برنامه نویسی خود وارد عمل شد. برنامه این است که سومین و آخرین گروه دانشجویان آزمونها را اجرا کرده، تنظیم دقیق کنند و دستگاه را در سال آینده تکمیل کنند.
احمدی امیدوار است تا سال ۲۰۲۶ آزمایشات بالینی را با اسکلت بیرونی در بیمارستان اتاوا آغاز کند.
علاقه اولیه احمدی به کمک به افراد دارای معلولیت ناشی از تمایل به کمک به اعضای خانواده با بیماری های جسمی بود.
او میگوید: « وقتی بچه بودم پدربزرگم سکته کرد، دو سال در رختخواب دراز کشیده بود تا اینکه از دنیا رفت. دیدم چقدر ناتوان کننده است. من همچنین شاهد بودم که مننژیت تعادل یکی دیگر از اعضای خانواده ام را از بین برده است.»


مجتبی احمدی (وسط) و دو دانشجوی دکترای آزمایشگاهش، سید حسین سادات حسینی (راست) و مسعود کریمی (چپ)
انتهای پیام